容器
Map实现
1,结构体,map是个指针,底层指向hmap,所以是个引用类型
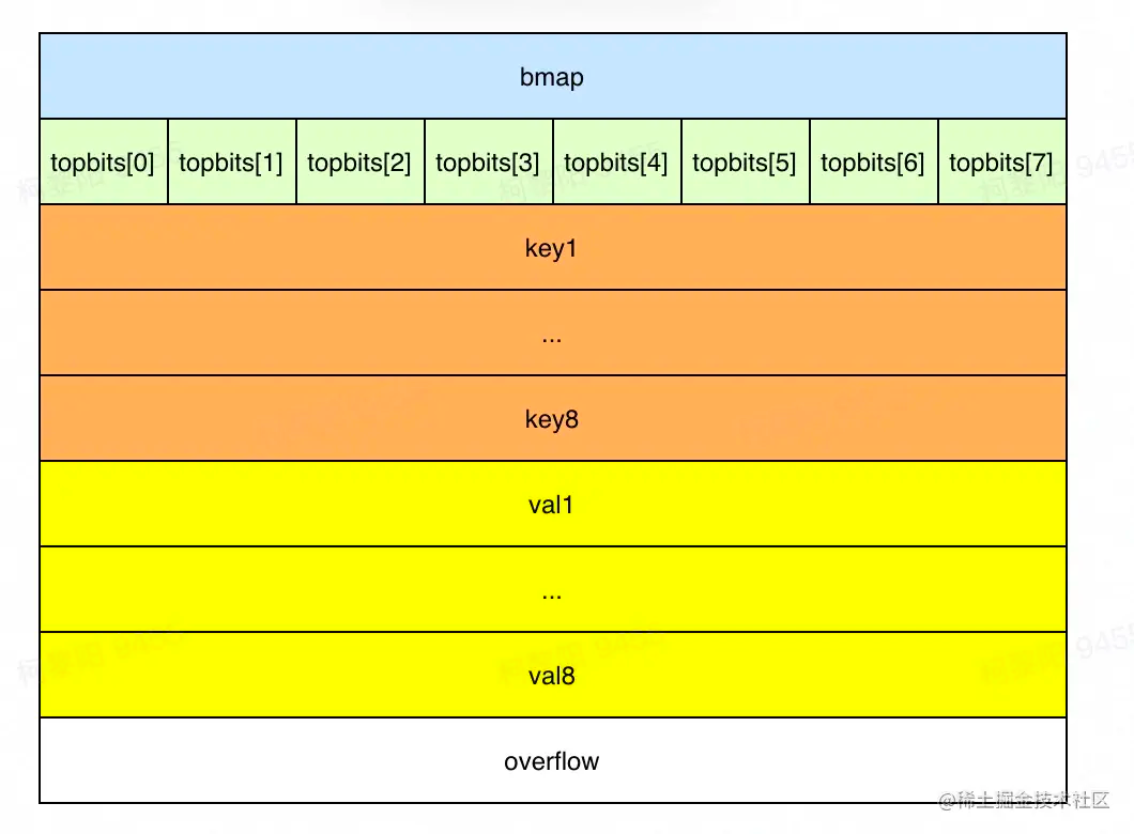
1type hmap struct {2 // 键值对的数量3 count int 4 // 标记当前是否有协程在写,或遍历5 flags uint86 // 桶数组长度 = 2 ^ B。当n=3时,桶数组长度=87 B uint8 8 // 溢出桶的大概数量9 noverflow uint16 10 // hash种子,新建map时生成。每个map的hash种子都是随机生成,同样的key在两个map中大概率定位到不同的桶,以保证随机性。11 hash0 uint32 12 // 指向桶数组13 buckets unsafe.Pointer 14 // 指向老桶数组,扩容时用。渐进式扩容,需要同时保存老桶和新桶,两个桶同时用于查找,遍历等操作,当扩容完毕删除oldbuckets。老的buckets数组大小是新的buckets的1/2;非扩容状态下,它为nil。15 oldbuckets unsafe.Pointer 16 // 表示扩容进度,小于此地址的buckets代表已搬迁完成。17 nevacuate uintptr 18 extra *mapextra // optional fields19}xxxxxxxxxx91type bmap struct {2 // 根据hash值的高8位来决key到底落入桶内的哪个位置,用来快速定位key是否在这个bmap中3 topbits [bucketCnt]uint8 // bucketCnt = 8,一个桶最多存储8个键值对,4 keys [bucketCnt]keytype5 values [bucketCnt]valuetype6 pad uintptr7 // 指向溢出桶,用到溢出桶需要一个桶8位塞满8个元素,这在其他语言发生概率较低,比如java的hashmap,默认装置因子0.75表示平均一个桶有0.75个元素就要发生扩容,但go map的扩容条件比较苛刻,装载因子为6.5,因此有一定的概率使用溢出桶若超过8个元素都被定位到该桶时,需建新桶,挂到前一个桶的overflow上8 overflow uintptr9}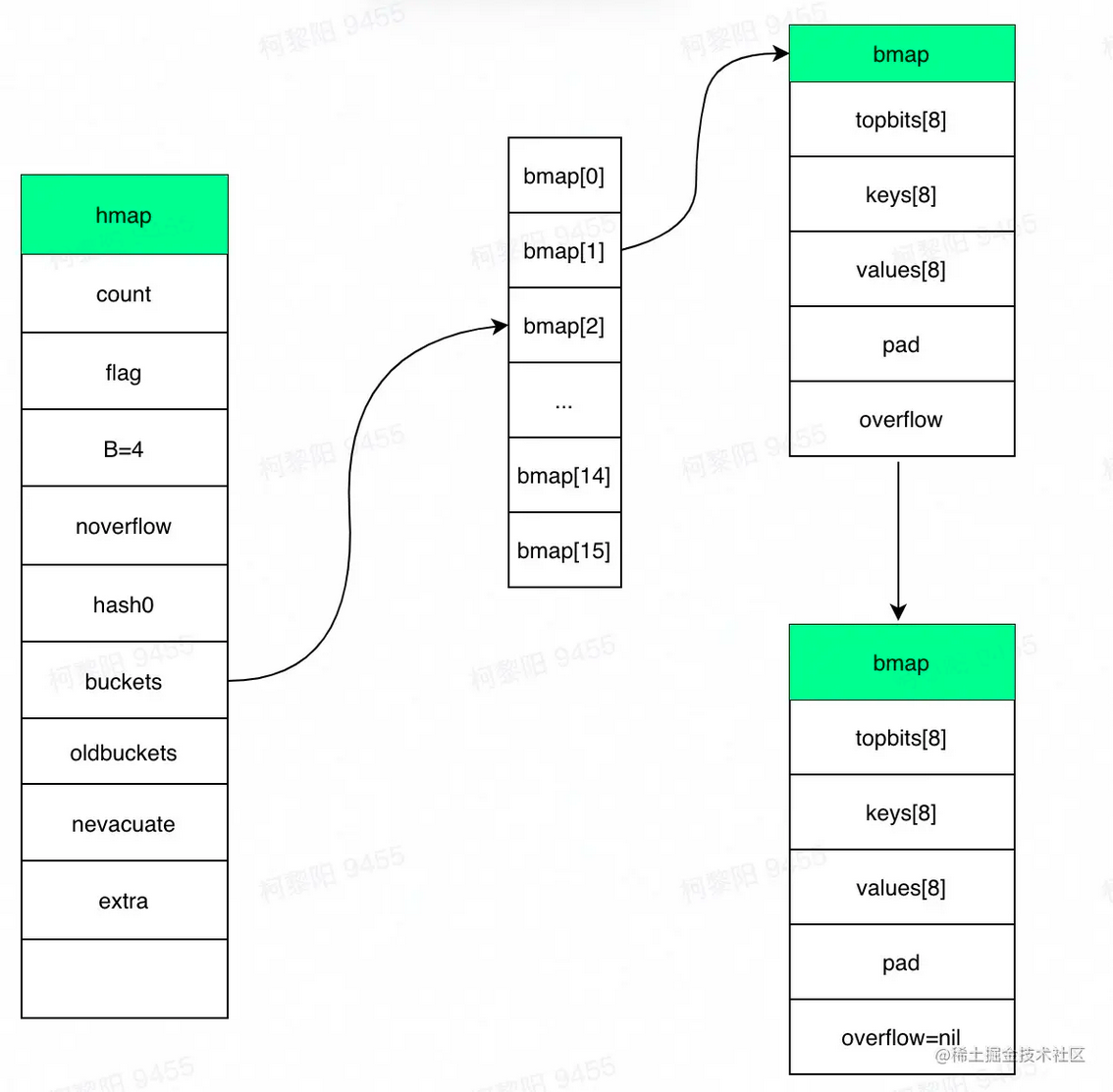
2,定位
===>计算hash(key),每种类型的哈希方法由系统初始化,再加上随机种子hash := alg.hash(key, uintptr(h.hash0))
===>定位桶:根据hash值(64位机下共 64 个 bit 位)的后B位定位桶,b := (*bmap)(unsafe.Pointer(uintptr(h.buckets) + (hash&mask)*uintptr(t.bucketsize)))。如果map未在扩容或者当前bucket已经完成扩容,在当前bucket中查找,若当前bucket正在扩容,则到老bucket查找。
===>定位槽:每个key生成了一个tophash,取值为hash值前8位。先和tophash的每个值比较,若不等,则key一定不在该槽,若相等,进一步调用alg.equal(key, k)方法验证。
===>当前桶遍历完没有key时,若bmap.overflow不为空,需要继续寻找溢出桶,定位方式和之前一样。
3,扩容
触发:元素个数大于8且元素个数大于 6.5 * 桶的数量;溢出桶过多(此时哈希表中可能元素不多,但有大量桶,且有大量空槽,这种场景出现的原因一般是先大量添加元素,再大量删除,再插入很多元素,就会留下一些空洞,定位key需要额外扫描空的位置,降低性能,需要进行处理)。
若为元素过多,则将数组容量翻倍。否则是溢出桶过多,采用原桶容量(元素不多,不需要更大的容量,只是需要重新整合,消除溢出桶)
渐进式扩容,在插入、修改或者删除时,使用(oldbuckets != nil )触发搬迁数据,每次搬迁2个桶到新桶上,其中一个是key所在的桶,和一个另外的桶,新桶下标计算与java相同。这样扩容的好处是将扩容的复杂度均摊到每次操作,保证在map操作上耗时稳定,缺点是实现复杂。
在扩容过程中,写入数据时会把该key对应的老bucket迁移,并将数据写入新桶;遍历时key对应的老桶还没被搬迁,则需要到老桶上找元素。
4,遍历
随机性:每次for-range遍历map的顺序不一样。开始遍历的桶startBucket不一样,且遍历每个桶时开始位置offset也不同(不同rang的offset不同,同一个range内全部桶得offset相同)。编程语言没有定义map的迭代顺序,不同平台的遍历顺序可能不一样,这导致基于特定顺序的代码在不同平台之间的运行结果可能不一致,另外map扩容后,一个bucket的数据会分散到两个bucket,也会导致顺序产生变化,因此为了防止程序员依赖特定的迭代顺序,map的迭代就不可预测。如果想顺序遍历 map,需要对 map key 先排序,再按照 key 的顺序遍历 map。
xxxxxxxxxx121// 实现有序遍历2var sl []int3// 把 key 单独取出放到切片4for k := range m {5 sl = append(sl, k)6}7// 排序切片8sort.Ints(sl)9// 以切片中的 key 顺序遍历 map 就是有序的了10for _, k := range sl {11 t.Log(k, m[k])12}考虑扩容:由于是渐进式扩容,可能遍历的过程中同时扩容也在进行,有些bucket可能已经被搬到新map,有些没有。因此遍历时需要考虑在新老哪个map取数据。
map无法并发读写,需要对写和读操作进行加锁,或者使用使用sync.Map。
xxxxxxxxxx121// fatal error: concurrent map read and map write2m := make(map[int]int)3go func() {4 for {5 _ = m[1]6 }7}()8go func() {9 for {10 m[2] = 211 }12}()xxxxxxxxxx141// 1.19前解决办法:加全局读写锁,或者根据hash值分片加读写锁2var counter = struct{3 sync.RWMutex4 m map[string]int5}{m: make(map[string]int)}6// 读数据加读锁,读锁减少读写的时候因为锁带来的性能7counter.RLock()8n := counter.m["some_key"]9counter.RUnlock()10fmt.Println("some_key:", n)11// 读数据加写锁12counter.Lock()13counter.m["some_key"]++14counter.Unlock()sync.Map
- 空间换时间。通过冗余的两个数据结构(read、dirty),读写操作分开,读+更新+删除相关的操作尽量通过不加锁的 read 实现,写+新增相关的操作通过 dirty 加锁实现。实现加锁对性能的影响。
- 使用只读数据(read),避免读写冲突。
- 动态调整,新写入的 key 都只存在 dirty 中,如果 dirty 中的 key 被多次读取,dirty 就会上升成不需要加锁的 read。
- double-checking。
- 延迟删除。删除一个键值只是打标记,dirty 上升成 read 的时候,标记删除的 key 被批量移出 map。这样的好处是 dirty 变成 read 之前,这些 key 都会命中 read,而 read 不需要加锁。
xxxxxxxxxx121type Map struct {2 // 当涉及到dirty数据的操作的时候,需要使用这个锁3 mu Mutex4 // 一个只读的数据结构,因为只读,所以不会有读写冲突。它包含的元素其实也是通过原子操作更新的。5 read atomic.Value 6 // 包括所有在read字段中但未被expunged(删除)的元素以及新加的元素。虽有冗余,但是提升dirty字段为read的时候非常快,不用一个一个的复制,而是直接将这个数据结构作为read字段的一部分。7 // 对于dirty的操作需要加锁,因为对它的操作可能会有读写竞争。8 dirty map[interface{}]*entry9 // 当从Map中读取entry的时候,如果read中不包含这个entry,会尝试从dirty中读取,这个时候会将misses加一,10 // 当misses累积到 dirty的长度的时候, 就会将dirty提升为read,避免从dirty中miss太多次。因为操作dirty需要加锁。11 misses int12}虽然read和dirty有冗余数据,但这些数据是通过指针指向同一个数据,所以尽管Map的value会很大,但是冗余的空间占用还是有限的。read的数据结构是:
xxxxxxxxxx41type readOnly struct {2 m map[interface{}]*entry3 amended bool // 如果Map.dirty有些数据不在中的时候,这个值为true。如果从Map.read找不到数据的话,还要进一步到Map.dirty中查找。4}readOnly.m和Map.dirty存储的值类型是*entry,它包含一个指针p, 指向用户存储的value值。
xxxxxxxxxx31type entry struct {2 p unsafe.Pointer // *interface{}3}1,加载方法,也就是提供一个键key,查找对应的值value,如果不存在,通过ok反映:
xxxxxxxxxx261func (m *Map) Load(key interface{}) (value interface{}, ok bool) {2 // 1.首先从m.read中得到只读readOnly,从它的map中查找,不需要加锁3 read, _ := m.read.Load().(readOnly)4 e, ok := read.m[key]5 // 2. 如果没找到,并且m.dirty中有新数据,需要从m.dirty查找,这个时候需要加锁6 // 这两行语句并不是一个原子操作,需要双检查7 if !ok && read.amended {8 m.mu.Lock()9 // 双检查,避免加锁的时候m.dirty提升为m.read,这个时候m.read可能被替换了。10 read, _ = m.read.Load().(readOnly)11 e, ok = read.m[key]12 // 如果m.read中还是不存在,并且m.dirty中有新数据13 if !ok && read.amended {14 // 从m.dirty查找15 e, ok = m.dirty[key]16 // 不管m.dirty中存不存在,都将misses计数加一17 // missLocked()中满足条件后就会提升m.dirty18 m.missLocked()19 }20 m.mu.Unlock()21 }22 if !ok {23 return nil, false24 }25 return e.load()26}如果我们查询的键值正好存在于m.read中,无须加锁,直接返回,理论上性能优异。即使不存在于m.read中,经过miss几次之后,m.dirty会被提升为m.read,又会从m.read中查找。所以对于更新/增加较少,加载存在的key很多的case,性能基本和无锁的map类似。
2,missLocked方法中可能会将m.dirty提升。
xxxxxxxxxx111func (m *Map) missLocked() {2 m.misses++3 if m.misses < len(m.dirty) {4 return5 }6 // 将m.dirty作为readOnly的m字段,原子更新m.read7 m.read.Store(readOnly{m: m.dirty})8 // m.dirty、m.misses重置9 m.dirty = nil10 m.misses = 011}切片实现
1,使用指针指向底层数组,作为参数传递时指针作为值被复制,由同一个数组生成的两个切片是两个不同的变量,只有通过array指针指向同一个底层数组。当切片作为参数时,其实也是切片的拷贝,在拷贝的切片中其包含的指针成员变量的值是一样的,也就是说它们指向的数据源是一样
xxxxxxxxxx51type slice struct {2 array unsafe.Pointer3 len int4 cap int5}2,初始化
xxxxxxxxxx71// 内存空间大小 = 切片中元素大小 * 容量大小2// 计算根据cap需要分配的内存空间和内存是否有溢出3mem, overflow := math.MulUintptr(et.size, uintptr(cap))4// 如果cap溢出,计算根据len需要分配的内存空间和内存是否有溢出5em, overflow := math.MulUintptr(et.size, uintptr(len))6// 分配内存7mallocgc(mem, et, true)3,扩容,扩容切片指向新开辟的数组,而对于上层切片来说是没有变化的。
xxxxxxxxxx171newcap := old.cap2doublecap := newcap + newcap3//这个cap为old.cap+新加元素数量,即至少扩容值4// 如果两倍扩容达不到这个cap,新数组的容量就为这个cap5if cap > doublecap {6 newcap = cap7} else {8 // 如果两倍扩容达到了这个最小值,且老数组长度小于1024,就正常扩容两倍。9 if old.len < 1024 {10 newcap = doublecap11 } else {12 // 如果两倍扩容达到了这个最小值,且老数组长度大于等于1024,就循环扩容1.25倍,直到达到或者超过cap13 for newcap < cap {14 newcap += newcap / 415 }16 }17}slice是并发不安全的。slice在并发执行中不会报错,但是数据会丢失,可以在写入数据时加锁,保证同一时间只能有一个在执行写操作。或者将要写入的数据写入channel,由另一个独立的协程负责向切片写入数据。
xxxxxxxxxx31lock.Lock()2defer lock.Unlock()3slc = append(slc, a)xxxxxxxxxx131type ServiceData struct {2 ch chan int // 用来 同步的channel3 data []int // 存储数据的slice4}5func (s *ServiceData) Schedule() {6 // 从 channel 接收数据7 for i := range s.ch {8 s.data = append(s.data, i)9 }10}11func (s *ServiceData) AddData(v int) {12 s.ch <- v // 发送数据到 channel13}channel
用于在协程间传递消息,收发遵循先进先出 FIFO,golang实现基于通信的资源内存,可实现生产者、消费者模型,以及多协程间的并发控制(缓存区大小即为资源数,占用资源时就可以向channel写入,结束资源占用就从channel读出,缓冲区满其它写入协程将阻塞)。
- 给⼀个 nil channel 发送、接收数据,造成永远阻塞
- 给⼀个已经关闭的 channel 发送数据,引起 panic
- 从⼀个已经关闭的 channel 接收数据,如果缓冲区中为空,则返回⼀个零值,非空返回缓冲区值
- ⽆缓冲的 channel 是同步的,⽽有缓冲的 channel 是⾮同步的
- 关闭⼀个 nil channel 将会发⽣ panic
channel 中使⽤了 ring buffer(环形缓冲区)来缓存写⼊的数据。
xxxxxxxxxx181type hchan struct {2 qcount uint // 队列中的总元素个数3 dataqsiz uint // 环形队列大小,即可存放元素的个数4 buf unsafe.Pointer // 环形队列指针,固定长度的双向循环列表5 elemsize uint16 //每个元素的大小6 closed uint32 //标识关闭状态7 elemtype *_type // 元素类型8 sendx uint // 下一个可接收发送数据的索引,buf[sendx]=newData9 recvx uint // 下一个可读取数据的索引,data=buf[recvx]10 recvq waitq // 等待读消息的goroutine队列,如果缓冲空,将当前 goroutine 加入 recvq ,进入睡眠,等待被写 goroutine 唤醒。11 sendq waitq // 等待写消息的goroutine队列。若缓冲区中没有空余位置,则将发送数据写入 G,将当前 G 加入 sendq ,进入睡眠,等待被读 goroutine 唤醒。若等待接收队列 recvq 不为空,则缓冲区中无数据或无缓冲区,将直接从 recvq 取出 G ,并把数据写入,最后把该 G 唤醒,结束发送过程。12 lock mutex //互斥锁,chan不允许并发读写13}14// 等待读写的队列数据结构,保证先进先出15type waitq struct {16 first *sudog17 last *sudog18}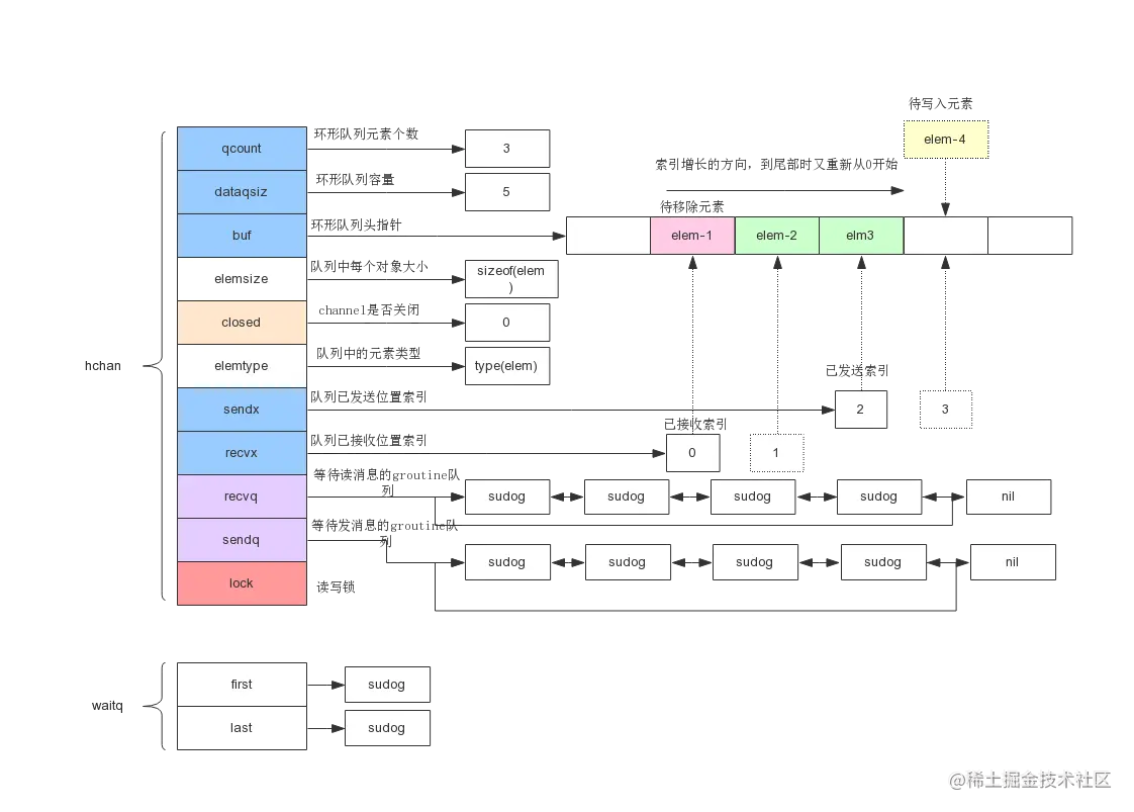
初始化:
===> 缓冲区大小:
buff_size = elem.size* size===>
buff_size为0或者每个元素占用的大小为0(无缓冲区或者重送空结构体,不占据内存),只需要分配hchan结构体本身占用的大小。c = (*hchan)(mallocgc(hchanSize, nil, true))===>传送内容为指针对象,为buf单独开辟mem大小的空间,用来保存所有的数据。
c = new(hchan),c.buf = mallocgc(buff_size , elem, true)===>传送内容不是指针对象,占据空间为
hchanSize+buff_size,其中hchanSize为hchan自身占据的空间。c = (*hchan)(mallocgc(hchanSize+mem, nil, true))向 channel 写数据:
- 若等待接收队列 recvq 不为空,则缓冲区中无数据或无缓冲区,将直接从 recvq 取出 G ,并把数据写入,最后把该 G 唤醒,结束发送过程。
- 若等待接收队列 recvq 空,缓冲区中有空余位置,则将数据写入缓冲区,结束发送过程。
- 若等待接收队列 recvq 空,缓冲区中没有空余位置,则将要发送的数据和当前的Groutine打包成Sudog对象放入sendq,并将groutine置为等待状态,等待被读 goroutine 唤醒。
- 从 channel 读数据
- 若等待发送队列 sendq 不为空,且没有缓冲区,直接从 sendq 中取出 G ,把 G 中数据读出,最后把 G 唤醒,结束读取过程。
- 如果等待发送队列 sendq 不为空,且缓冲区已满,从缓冲区中首部读出数据,把 G 中数据写入缓冲区尾部,把 G 唤醒,结束读取过程。
- 若等待发送队列 sendq 空,且缓冲区中有数据,则从缓冲区取出数据,结束读取过程。
- 若等待发送队列 sendq 空,且缓冲区空,则阻塞该Groutine,并将groutine打包为sudogo加入到recevq等待队列中,等待被写 goroutine 唤醒。
- 关闭:唤醒所有等待读取chanel的协程;所有等待写入channel的协程,抛出异常
- 并发安全:指针一段写入一段读取,防止随意未知写入数据造成竞争;每次读取或者写入数据都要加锁,同一时刻最多只有一个读或者写;